


Descripción del producto
- Puede ser ampliamente utilizado en la evitación de obstáculos del robot, coche de la evitación de obstáculos, conteo de líneas, y seguimiento de líneas en blanco y negro y así sucesivamente.
- El rango de distancia efectivo de 2 ~ 11.8 in, el voltaje de trabajo de 3.3V- 5V.
Información Módulo de sensor de evitación de obstáculo:
- .Cuando el modulo detecta un obstáculo en el frente de la señal, el indicador de luz verde de la placa, mientras este a nivel bajo continua una señal de salida puerto OUT, el modulo detecta la distancia 2- 30cm, ángulo detención 35, la distancia pude ser detectada La distancia puede detectar el potencial se ajusta en el sentido horario potenciómetro para detectar la distancia aumenta; En sentido anti horario para ajustar el potenciómetro para reducir la distancia de detección.
- Los sensores infrarrojos activos para detectar el reflejo, y por lo tanto la forma de la reflectividad del rango de detección objetivo es crítica.
La distancia de detección mínima que el negro, blanco máximo; pequeños objetos de una pequeña área, una gran área de la Grand. - La salida del puerto OUT del módulo sensor se pude conectar directamente al puerto IO del microcontrolador, Usted puede conducir directamente un relay de 5V; Conexión : VCC-VCC; GND-GND; OUT-IO 4.
- Usando el comparador LM393, stable. Puede usar para 3-5VDC módulos fuente de alimentación. Cuando se enciende la alimentación, la fuente
- Indicador de Luz;
- Con los agujeros de tornillo de 3mm, fácil de fijar:
- tamaño de la placa: 3.1cm * 1.5cm
- VCC: esternal 3.3V-5V voltaje (Puede conectarse directamente a 5v MCU y 3.3v MCU).
- GND: GND External
- OUT: Interfaces (0 y 1) de salida digitales para tarjetas pequeñas
¿Cómo funciona un sensor de proximidad por infrarrojos?
La luz infrarroja (IR) se basa en los principios de la óptica. Un sensor de proximidad IR funciona aplicando un voltaje a un par de diodos emisores de luz IR (LED) que, a su vez, emiten luz infrarroja. Esta luz se propaga a través del aire y, una vez que incide en un objeto, se refleja hacia el sensor.
¿Cómo detecta un sensor infrarrojo?
- El emisor lanza una señal infrarroja que, al encontrar un ser vivo o un objeto, se refleja hacia el receptor.
- Dependiendo de la intensidad de la señal reflejada, los infrarrojos pueden determinar la distancia del ser vivo u objeto detectado.
¿Qué alcance tiene un sensor infrarrojo?
El alcance del sensor es de 2 a 30 cm, que se puede ajustar a través del potenciómetro en la placa.
¿Qué es un sensor de obstáculos?
Un detector de obstáculos infrarrojo es un dispositivo que detecta la presencia de un objeto mediante la reflexión que produce en la luz. El uso de luz infrarroja (IR) es simplemente para que esta no sea visible para los humanos.
Proyectos
Detectar el Obstáculo
Este módulo se instala comúnmente en automóviles y robots para juzgar la existencia de obstáculos por delante. También se utiliza ampliamente en dispositivos portátiles, grifos de agua y otros.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes:
- Placa Arduino R3
- Cables Puente
- Módulo de Evitación de Obstáculos
Esquemático
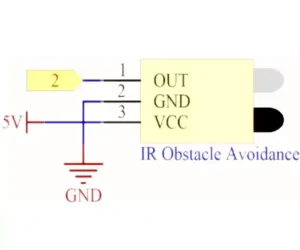
El pin digital 2 se usa para leer la señal del Módulo de Evitación de Obstáculos IR. Conectamos el VCC del Módulo Sensor IR a 5V, GND a GND, OUT al pin digital 2.
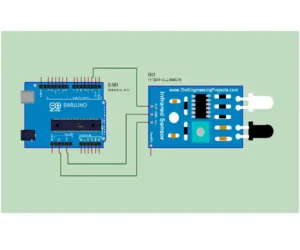
Cableado
Código
int irObstaclePin = 2;
void setup() {
Serial.begin(9600);
pinMode(irObstaclePin, INPUT);
}
void loop() {
Serial.println(digitalRead(irObstaclePin));
delay(10);
}
Cuando el módulo de evitación de obstáculos IR detecta algo bloqueando su frente, aparecerá [0] en el monitor serial, de lo contrario, se mostrará [1].
| Peso | 0.002 kg |
|---|---|
| Dimensiones | 3.9 × 1.4 × 0.6 cm |
Productos relacionados

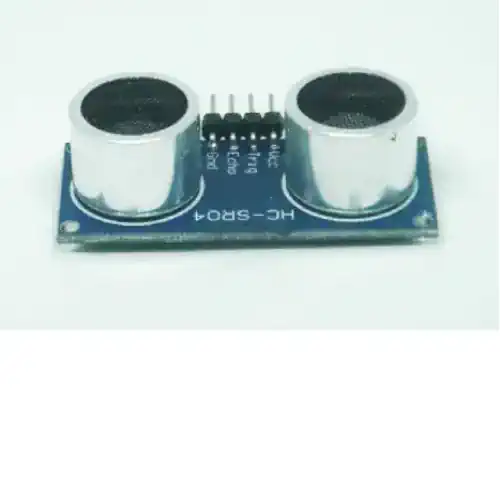
Sensores de Distancia